
КАЛИБРОВКА НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА
Современный наземный лазерный сканер представляет собой автоматизированную систему сбора пространственных данных, работающую с очень высокой скоростью (до 1 миллиона точек в секунду), обеспечивая при этом миллиметровую точность.
В основе наземный лазерный сканер состоит из лазерного дальномера и блока развертки лазерного луча. В качестве блока развёртки выступают сервопривод и полигональное зеркало или призма. Сервопривод отклоняет луч на заданную величину в горизонтальной плоскости, при этом у большинства моделей поворачивается вся верхняя часть сканера. Развёртка в вертикальной плоскости осуществляется за счёт вращения или качания зеркала.
По принципу измерения расстояний сканеры делятся на импульсные и фазовые. Импульсный метод измерения расстояний основан на измерении времени прохождения сигнала от приёмо-передающего устройства до объекта и обратно. Фазовый метод измерения основан на определении разности фаз, посылаемых и принимаемых модулированных сигналов. Результатом работы лазерного сканера является растровое изображение - скан, значения пикселей которого представляют собой элементы вектора с измеренным расстоянием и интенсивностью отражённого. С помощью специализированного программного обеспечения из растрового скана можно создать облако точек, пересчитав каждый пиксель скана из полярной системы координат в прямоугольную декартову с учетом результатов калибровки конкретного прибора.
В процессе эксплуатации ряд узлов лазерного сканера испытывает значительные динамические нагрузки, и со временем результаты калибровки уже не полностью компенсируют систематические ошибки прибора, что приводит к ухудшению точности выходного облака точек. Кроме того, могут возникать не стандартные условия съемки (съемка под значительным углом или в перевернутом состоянии), что производителем не запрещается, но в этом случае не гарантируется точность выходного результата. Чтобы точность измерений сканера удовлетворяла заявленным требованиям – необходимо периодически повторять его калибровку, а также выполнять её под конкретный не стандартный случай съемки. На сегодняшний день производители оборудования по-разному подходят к решению проблемы калибровки лазерного сканера. Некоторые производители предоставляют сервисную функцию самокалибровки, но на сегодняшний день – это скорее исключение, чем правило. Другие предлагают функцию контроля калибровки, т.е. насколько заводские калибровочные параметры актуальны и способны компенсировать ошибки сканирования. И третьи, полностью отказывают в предоставлении сервисных функций, отвечающих за калибровку. В большинстве случаев, калибровка лазерного сканера – это дорогостоящая и длительная услуга, к тому же зачастую связанная с перевозом прибора через границу, поскольку в Российской Федерации отсутствуют сервисные центры большинства производителей лазерных сканеров. В то же время, как правило, задача периодической калибровки сводится к актуализации поправок минимизирующих влияние систематических ошибок прибора на результаты сканирования и решается на программном уровне.
В данной статье рассматривается решение актуальной задачи, - разработки универсальной технологии калибровки наземных лазерных сканирующих систем и специализированного программного обеспечения.
Калибровку лазерного сканера можно выполнять как по первичным данным (расстояния, горизонтальные и вертикальные углы, полученные как результат измерений в процессе сканирования) так и по вторичным данным (расстояния, горизонтальные и вертикальные углы, полученные как функции трехмерных декартовых координат возвращаемых прибором по результатам сканирования).
Калибровка на основе первичных данных во многом является более предпочтительной, поскольку позволяет непосредственно определять и учитывать основные инструментальные ошибки сканера, вызванные не оптимальным взаимным расположением основных осей и узлов прибора (коллимационная ошибка, эксцентриситеты горизонтального и вертикального угловых отсчетных устройств и т.п.). Данные виды ошибок и методы их поверки у геодезических приборов хорошо изучены, а формулы учета в результатах измерений имеют простой и законченный вид. Однако не всегда есть возможность выполнить калибровку сканера по первичным данным, поскольку производители оборудования часто закрывают доступ к «сырым» данным прибора и показаниям датчиков, а несанкционированная производителем «прошивка» внутренней памяти прибора приводит к потере гарантии. Поэтому самостоятельно калибровку сканера по первичным данным можно выполнить лишь в случае, если данная процедура предусмотрена фирмой изготовителем как пользовательская. В остальных же случаях единственный путь минимизировать влияние систематических ошибок и повысить качество выходной информации – это провести калибровку по расстояниям, горизонтальным и вертикальным углам, восстановленным по координатам отсканированных точек. В целях упрощения изложения данный вид калибровки далее будем называть посткалибровкой. Полученные таким образом вторичные данные отягощены не только собственно ошибками измерений, но и не вполне актуальными уже заводскими поправками. Таким образом, задача посткалибровки сводится к выявлению остаточных ошибок сканирования после применения заводских параметров с целью их компенсации при создании выходного облака точек. Данную задачу удобно решать по сканам пространственного испытательного полигона, координаты марок которого известны с заведомо более высокой точностью, чем их можно определить по результатам сканирования.
Задачу выполнения калибровки сканера предлагается разбить на следующие этапы:
Построение пространственного испытательного полигона – печать и закрепление марок.
Измерение марок полигона с помощью тахеометра и определение их координат.
Сканирование полигона сканером, подлежащим калибровке, в различных положениях.
Измерение марок на сканах.
Выявление ошибок несоответствия координат марок полигона и марок, измеренных по сканам.
Вычисление полиномов компенсации ошибок.
Применение полиномов компенсации при создании облака точек.
На сегодняшний день, наиболее востребованы два типа сканеров, которые позволяют получать круговые сканы. Это сканеры, которые вращаются вокруг своей оси на 180°, а зеркало вращают на 360° и сканеры, которые в результате сканирования совершают полный оборот вокруг своей оси, а зеркало качают на 180°. Тем не менее, вне зависимости от вида сканирования, традиционное представление развертки скана, в большинстве программных продуктов, выглядит в виде растра с измерениями на 360° по горизонтальному углу и на 180° по вертикальному (Изображение 1).
В основе наземный лазерный сканер состоит из лазерного дальномера и блока развертки лазерного луча. В качестве блока развёртки выступают сервопривод и полигональное зеркало или призма. Сервопривод отклоняет луч на заданную величину в горизонтальной плоскости, при этом у большинства моделей поворачивается вся верхняя часть сканера. Развёртка в вертикальной плоскости осуществляется за счёт вращения или качания зеркала.
По принципу измерения расстояний сканеры делятся на импульсные и фазовые. Импульсный метод измерения расстояний основан на измерении времени прохождения сигнала от приёмо-передающего устройства до объекта и обратно. Фазовый метод измерения основан на определении разности фаз, посылаемых и принимаемых модулированных сигналов. Результатом работы лазерного сканера является растровое изображение - скан, значения пикселей которого представляют собой элементы вектора с измеренным расстоянием и интенсивностью отражённого. С помощью специализированного программного обеспечения из растрового скана можно создать облако точек, пересчитав каждый пиксель скана из полярной системы координат в прямоугольную декартову с учетом результатов калибровки конкретного прибора.
В процессе эксплуатации ряд узлов лазерного сканера испытывает значительные динамические нагрузки, и со временем результаты калибровки уже не полностью компенсируют систематические ошибки прибора, что приводит к ухудшению точности выходного облака точек. Кроме того, могут возникать не стандартные условия съемки (съемка под значительным углом или в перевернутом состоянии), что производителем не запрещается, но в этом случае не гарантируется точность выходного результата. Чтобы точность измерений сканера удовлетворяла заявленным требованиям – необходимо периодически повторять его калибровку, а также выполнять её под конкретный не стандартный случай съемки. На сегодняшний день производители оборудования по-разному подходят к решению проблемы калибровки лазерного сканера. Некоторые производители предоставляют сервисную функцию самокалибровки, но на сегодняшний день – это скорее исключение, чем правило. Другие предлагают функцию контроля калибровки, т.е. насколько заводские калибровочные параметры актуальны и способны компенсировать ошибки сканирования. И третьи, полностью отказывают в предоставлении сервисных функций, отвечающих за калибровку. В большинстве случаев, калибровка лазерного сканера – это дорогостоящая и длительная услуга, к тому же зачастую связанная с перевозом прибора через границу, поскольку в Российской Федерации отсутствуют сервисные центры большинства производителей лазерных сканеров. В то же время, как правило, задача периодической калибровки сводится к актуализации поправок минимизирующих влияние систематических ошибок прибора на результаты сканирования и решается на программном уровне.
В данной статье рассматривается решение актуальной задачи, - разработки универсальной технологии калибровки наземных лазерных сканирующих систем и специализированного программного обеспечения.
Калибровку лазерного сканера можно выполнять как по первичным данным (расстояния, горизонтальные и вертикальные углы, полученные как результат измерений в процессе сканирования) так и по вторичным данным (расстояния, горизонтальные и вертикальные углы, полученные как функции трехмерных декартовых координат возвращаемых прибором по результатам сканирования).
Калибровка на основе первичных данных во многом является более предпочтительной, поскольку позволяет непосредственно определять и учитывать основные инструментальные ошибки сканера, вызванные не оптимальным взаимным расположением основных осей и узлов прибора (коллимационная ошибка, эксцентриситеты горизонтального и вертикального угловых отсчетных устройств и т.п.). Данные виды ошибок и методы их поверки у геодезических приборов хорошо изучены, а формулы учета в результатах измерений имеют простой и законченный вид. Однако не всегда есть возможность выполнить калибровку сканера по первичным данным, поскольку производители оборудования часто закрывают доступ к «сырым» данным прибора и показаниям датчиков, а несанкционированная производителем «прошивка» внутренней памяти прибора приводит к потере гарантии. Поэтому самостоятельно калибровку сканера по первичным данным можно выполнить лишь в случае, если данная процедура предусмотрена фирмой изготовителем как пользовательская. В остальных же случаях единственный путь минимизировать влияние систематических ошибок и повысить качество выходной информации – это провести калибровку по расстояниям, горизонтальным и вертикальным углам, восстановленным по координатам отсканированных точек. В целях упрощения изложения данный вид калибровки далее будем называть посткалибровкой. Полученные таким образом вторичные данные отягощены не только собственно ошибками измерений, но и не вполне актуальными уже заводскими поправками. Таким образом, задача посткалибровки сводится к выявлению остаточных ошибок сканирования после применения заводских параметров с целью их компенсации при создании выходного облака точек. Данную задачу удобно решать по сканам пространственного испытательного полигона, координаты марок которого известны с заведомо более высокой точностью, чем их можно определить по результатам сканирования.
Задачу выполнения калибровки сканера предлагается разбить на следующие этапы:
Построение пространственного испытательного полигона – печать и закрепление марок.
Измерение марок полигона с помощью тахеометра и определение их координат.
Сканирование полигона сканером, подлежащим калибровке, в различных положениях.
Измерение марок на сканах.
Выявление ошибок несоответствия координат марок полигона и марок, измеренных по сканам.
Вычисление полиномов компенсации ошибок.
Применение полиномов компенсации при создании облака точек.
На сегодняшний день, наиболее востребованы два типа сканеров, которые позволяют получать круговые сканы. Это сканеры, которые вращаются вокруг своей оси на 180°, а зеркало вращают на 360° и сканеры, которые в результате сканирования совершают полный оборот вокруг своей оси, а зеркало качают на 180°. Тем не менее, вне зависимости от вида сканирования, традиционное представление развертки скана, в большинстве программных продуктов, выглядит в виде растра с измерениями на 360° по горизонтальному углу и на 180° по вертикальному (Изображение 1).
Пересчет из прямоугольной декартовой системы координат в полярную осуществляется по следующим формулам (с учетом знаков координат для расстановки по координатным четвертям):
Для сканера, осуществляющего при сканировании поворот по горизонтальном углу на 360°:
где H – горизонтальный угол;
где V – верикальный угол;
x,y,z– декартовы координаты марок относительно сканера.
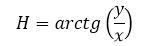
Для сканера, осуществляющего при сканировании поворот по горизонтальном углу на 180°:
где H – горизонтальный угол;
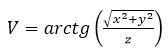
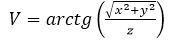
где V – верикальный угол для прямого хода;
где V – верикальный угол для обратного хода;
x,y,z– декартовы координаты марок относительно сканера. Разделение на прямой и обратный ход осуществлялось делением каталога точек скана ровно пополам.
Расстояние D до марок по координатам вне зависимости от типа сканера находим по формуле:
В качестве математической модели, описывающей ошибки несоответствия координат марок полигона и координат марок, определенных по результатам сканирования, предлагается использовались степенные полиномы.
Для горизонтальных углов составляются уравнения вида (на примере полинома 3-й степени):
Для вертикальных углов составляются уравнения вида (на примере полинома 3-й степени):
Для дальности составляются уравнения вида (на примере полинома 2-й степени):
где a,b,c – определяемые коэффициенты полиномов, – горизонтальный угол вычисленный по координатам марки полученным в результате сканирования, – вертикальный угол вычисленный по координатам марки полученным в результате сканирования, – горизонтальный угол вычисленный по исходным координатам марки полигона приведенным в систему станции сканирования, – вертикальный угол вычисленный по исходным координатам марки полигона приведенным в систему станции сканирования, – дальность до марки вычисленная по координатам полученным в результате сканирования, – дальность до марки вычисленная по ее исходным координатам, приведенным в систему станции сканирования.
В результате решения системы уравнений по МНК, находим коэффициенты полиномов для горизонтального и вертикального углов, а также для дальности. На основании полученных коэффициентов полиномов можно вычислить поправку в каждое измерение, выполненное откалиброванным прибором.
Для тестирования метода калибровки был выбран скоростной фазовый лазерный сканер Faro Focus 3D S120 (Изображение 3) со следующими техническими
характеристиками:
Для сканера, осуществляющего при сканировании поворот по горизонтальном углу на 360°:
где H – горизонтальный угол;
где V – верикальный угол;
x,y,z– декартовы координаты марок относительно сканера.
Для сканера, осуществляющего при сканировании поворот по горизонтальном углу на 180°:
где H – горизонтальный угол;
где V – верикальный угол для прямого хода;
где V – верикальный угол для обратного хода;
x,y,z– декартовы координаты марок относительно сканера. Разделение на прямой и обратный ход осуществлялось делением каталога точек скана ровно пополам.
Расстояние D до марок по координатам вне зависимости от типа сканера находим по формуле:
В качестве математической модели, описывающей ошибки несоответствия координат марок полигона и координат марок, определенных по результатам сканирования, предлагается использовались степенные полиномы.
Для горизонтальных углов составляются уравнения вида (на примере полинома 3-й степени):
Для вертикальных углов составляются уравнения вида (на примере полинома 3-й степени):
Для дальности составляются уравнения вида (на примере полинома 2-й степени):
где a,b,c – определяемые коэффициенты полиномов, – горизонтальный угол вычисленный по координатам марки полученным в результате сканирования, – вертикальный угол вычисленный по координатам марки полученным в результате сканирования, – горизонтальный угол вычисленный по исходным координатам марки полигона приведенным в систему станции сканирования, – вертикальный угол вычисленный по исходным координатам марки полигона приведенным в систему станции сканирования, – дальность до марки вычисленная по координатам полученным в результате сканирования, – дальность до марки вычисленная по ее исходным координатам, приведенным в систему станции сканирования.
В результате решения системы уравнений по МНК, находим коэффициенты полиномов для горизонтального и вертикального углов, а также для дальности. На основании полученных коэффициентов полиномов можно вычислить поправку в каждое измерение, выполненное откалиброванным прибором.
Для тестирования метода калибровки был выбран скоростной фазовый лазерный сканер Faro Focus 3D S120 (Изображение 3) со следующими техническими
характеристиками:
Ключевые слова: калибровка, лазерный сканер, МНК
При калибровке традиционный вид развертки для определения углов можно использовать только для сканеров, совершающих в результате сканирования полный оборот вокруг своей оси. В случае если круговой скан получен иным способом, для определений углов развертку скана необходимо представить в соответствии принципом измерений прибора. На изображении 2 показана развертка скана сканера, совершающего половину оборота вокруг своей оси и вращающего зеркало на 360°.
.

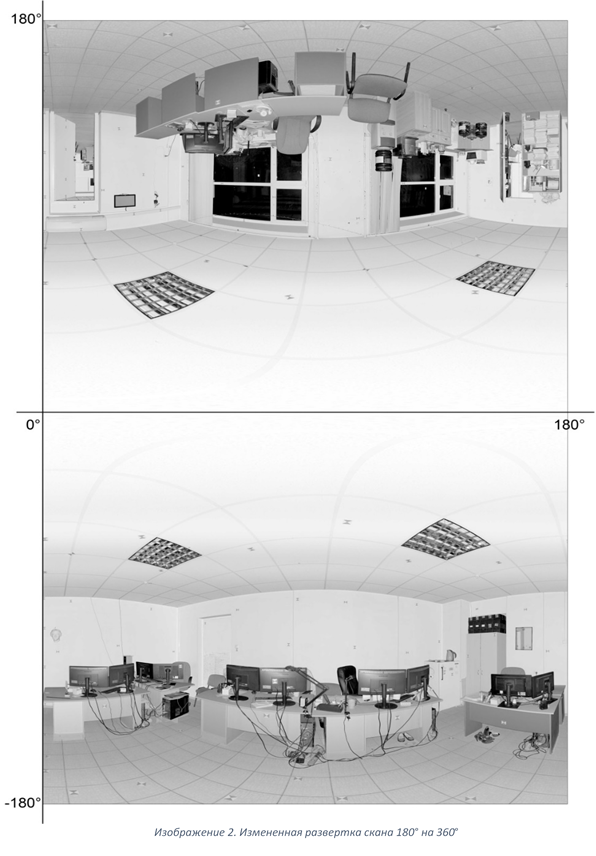





Кроме того, в результате кругового сканирования, как правило, получается зона перекрытия в несколько градусов, поэтому для корректной калибровки необхоодимо разделить измерения, условно говоря, на левый и правый круги или прямой и обратный ход. В результате измерения марок тахеометром и уравнивания линейно-угловой сети получается каталог точек испытательного полигона в декартовой системе координат. Точность координат марок полигона должна быть в несколько раз выше точности координат марок, которые можно получить в результате сканирования. Для упрощения расчетов при выполнении калибровки, исходные координаты марок полигона желательно привести к системе координат станции сканирования ортоганальным преобразованием (сдвиг и поворот по трем осям) по всем маркам с помощью МНК. Далее необходимо пересчитать координаты марок из прямоугольной декартовой системы координат в полярную (согласно принципу измерения сканера)
диапазон измерений: 0.6 м - 120 м
внутри/вне помещений с
рассеянным светом и 90%
отражающимися поверхностями
скорость измерения: 122 - 976 тыс. точек/сек
систематическая ошибка: ±2 мм на 10м и 25м
рабочая зона по вертикали: 305°
рабочая зона по горизонтали: 360°
максимальное вертикальное разрешение: 0.009°
максимальное горизонтальное разрешение: 0.009°
максимальная скорость сканирования (вращения зеркала): 5800 об/мин или 97 Гц;
В качестве экспериментального пространственного полигона было выбрано офисное помещение. На самоклеящейся пленке были напечатаны марки типа «песочные часы» (Изображение 4).
внутри/вне помещений с
рассеянным светом и 90%
отражающимися поверхностями
скорость измерения: 122 - 976 тыс. точек/сек
систематическая ошибка: ±2 мм на 10м и 25м
рабочая зона по вертикали: 305°
рабочая зона по горизонтали: 360°
максимальное вертикальное разрешение: 0.009°
максимальное горизонтальное разрешение: 0.009°
максимальная скорость сканирования (вращения зеркала): 5800 об/мин или 97 Гц;
В качестве экспериментального пространственного полигона было выбрано офисное помещение. На самоклеящейся пленке были напечатаны марки типа «песочные часы» (Изображение 4).
Марки были наклеены равно-
мерно по всемупомещению,
включая потолоки пол. Измере-
ния марок проводилось электрон-
ным тахеометром Leica TCR405
Power. Сканирование полигона
происходило при отключенных
датчиках: компенсатора, баро-
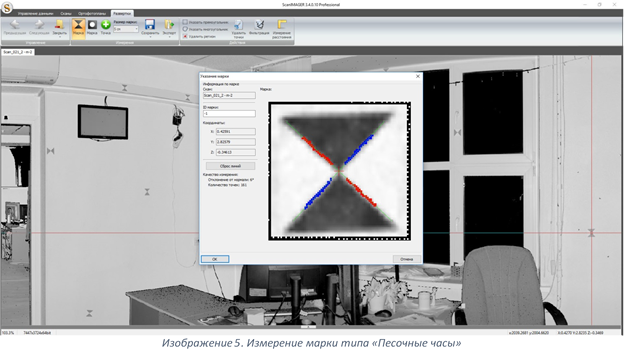
метра, GPS и компаса. Данный лазерный сканер был выбран не случайно. В определенный момент производственного процесса, в результате сведения сканов, полученных данным сканером, в единую систему координат, было замечено, что остаточные невязки по маркам превышают допустимые значения, а так же наличие двойных линий в зоне перекрытия одиночного скана. В результате чего, работу прибора необходимо было подвернуть анализу. Для этого было получено несколько сканов одного и того же полигона в различных начальных положениях сканера и несколько сканов без изменения ориентации прибора. В том случае, когда начальное положение сканера изменялось, то в результате сведения сканов между собой по измеренным маркам среднеквадратические ошибки составляли порядка 5мм. Когда же начальное положение сканера оставалось неизменным, то в результате сведения сканов между собой среднеквадратическая погрешность составляла уже менее 0.1 мм. На основании чего можно было сделать вывод, что измерения сканера стабильны, но в измерениях присутствуют систематические ошибки. Измерение марок проводилось в программном комплексе ScanIMAGER (разработка Научно-производственного предприятия «Фотограмметрия»). Запрограммированный в системе ScanIMAGER алгоритм измерения марки позволяет определять координаты ее центра с субпиксельной точностью (Изображение 5).
мерно по всемупомещению,
включая потолоки пол. Измере-
ния марок проводилось электрон-
ным тахеометром Leica TCR405
Power. Сканирование полигона
происходило при отключенных
датчиках: компенсатора, баро-
метра, GPS и компаса. Данный лазерный сканер был выбран не случайно. В определенный момент производственного процесса, в результате сведения сканов, полученных данным сканером, в единую систему координат, было замечено, что остаточные невязки по маркам превышают допустимые значения, а так же наличие двойных линий в зоне перекрытия одиночного скана. В результате чего, работу прибора необходимо было подвернуть анализу. Для этого было получено несколько сканов одного и того же полигона в различных начальных положениях сканера и несколько сканов без изменения ориентации прибора. В том случае, когда начальное положение сканера изменялось, то в результате сведения сканов между собой по измеренным маркам среднеквадратические ошибки составляли порядка 5мм. Когда же начальное положение сканера оставалось неизменным, то в результате сведения сканов между собой среднеквадратическая погрешность составляла уже менее 0.1 мм. На основании чего можно было сделать вывод, что измерения сканера стабильны, но в измерениях присутствуют систематические ошибки. Измерение марок проводилось в программном комплексе ScanIMAGER (разработка Научно-производственного предприятия «Фотограмметрия»). Запрограммированный в системе ScanIMAGER алгоритм измерения марки позволяет определять координаты ее центра с субпиксельной точностью (Изображение 5).
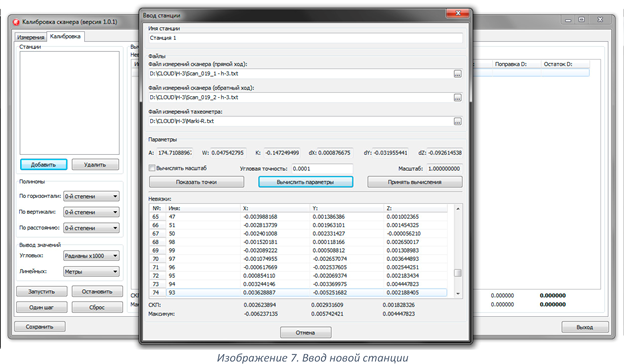
Для добавления станции сканирования необходимо указать файлы с координатами марок полученные по результатам сканирования отдельно для прямого и обратного хода, а также файл с координатами опорных марок полигона. После этого каталог опорных марок пересчитываются в систему координат каждой станции. После успешного пересчета координат выводятся параметры перехода, остаточные невязки и среднеквадратические отклонения (Изображение 7).
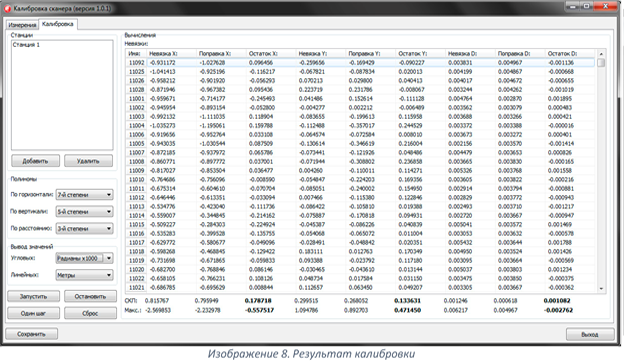
После ввода станций задаются степени полиномов для горизонтального угла, вертикального угла и дальности. Затем происходит вычисление коэффициентов полиномов с выводом невязок по каждой точке и среднеквадратические отклонения.
Изменяя степени полиномов, можно добиться минимальных остаточных невязок и сохранить результат вычислений в файл. Алгоритм коррекции скана был запрограммирован в рамках программного продукта ScanIMAGER (разработка Научно-производственного предприятия «Фотограмметрия») в процессе конвертации скана во внутренний формат программы. В результате коррекции, невязки после регистрации сканов между собой, полученных тестируемым прибором, уменьшились в три раза. Ошибки привязки блока сканов к опорной геодезической сети, по данным тахеометрических измерений марок, уменьшились в два раза. На основании проведенных экспериментов и полученного результата, можно сделать вывод о том, что в случае ухудшения измерительных свойств лазерного сканера и выхода их за рамки паспортных значений, посткалибровка способна восстановить точность измерений до величин, заявленных производителем. Хочется отметить, что предлагаемый метод посткалибровки не в коей мере не заменяет плановое обслуживание сканера у производителя, но способен в оперативном режиме и в сжатые сроки восстановить требуемую точность сканирования, а обслуживание сканера у производителя запланировать на более подходящее время. Кроме того, предлагаемый метод позволяет оперативно получить калибровочные параметры для случаев съемки с нестандартной установкой прибора, что иногда бывает полезно.
После ввода станций задаются степени полиномов для горизонтального угла, вертикального угла и дальности. Затем происходит вычисление коэффициентов полиномов с выводом невязок по каждой точке и среднеквадратические отклонения.
Изменяя степени полиномов, можно добиться минимальных остаточных невязок и сохранить результат вычислений в файл. Алгоритм коррекции скана был запрограммирован в рамках программного продукта ScanIMAGER (разработка Научно-производственного предприятия «Фотограмметрия») в процессе конвертации скана во внутренний формат программы. В результате коррекции, невязки после регистрации сканов между собой, полученных тестируемым прибором, уменьшились в три раза. Ошибки привязки блока сканов к опорной геодезической сети, по данным тахеометрических измерений марок, уменьшились в два раза. На основании проведенных экспериментов и полученного результата, можно сделать вывод о том, что в случае ухудшения измерительных свойств лазерного сканера и выхода их за рамки паспортных значений, посткалибровка способна восстановить точность измерений до величин, заявленных производителем. Хочется отметить, что предлагаемый метод посткалибровки не в коей мере не заменяет плановое обслуживание сканера у производителя, но способен в оперативном режиме и в сжатые сроки восстановить требуемую точность сканирования, а обслуживание сканера у производителя запланировать на более подходящее время. Кроме того, предлагаемый метод позволяет оперативно получить калибровочные параметры для случаев съемки с нестандартной установкой прибора, что иногда бывает полезно.
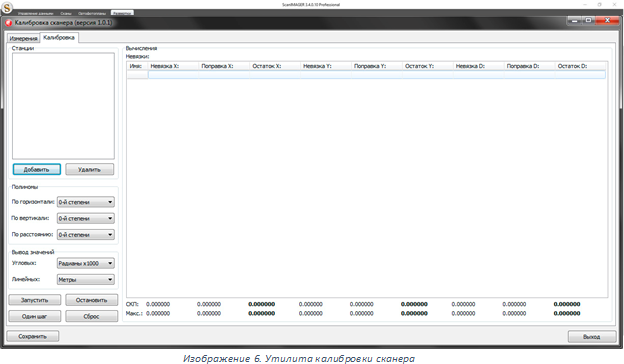
Алгоритм вычисления коэффициентов полиномов был запрограммирован в рамках программной утилиты ScanCalibr (Изображение 6). Утилита позволяет добавлять несколько станций сканирования и уравнивать их совместно с целью повышения плотности покрытия сканов марками и минимизации возможных ошибочных отклонений в математической модели коррекции.
